
by rb1205, published
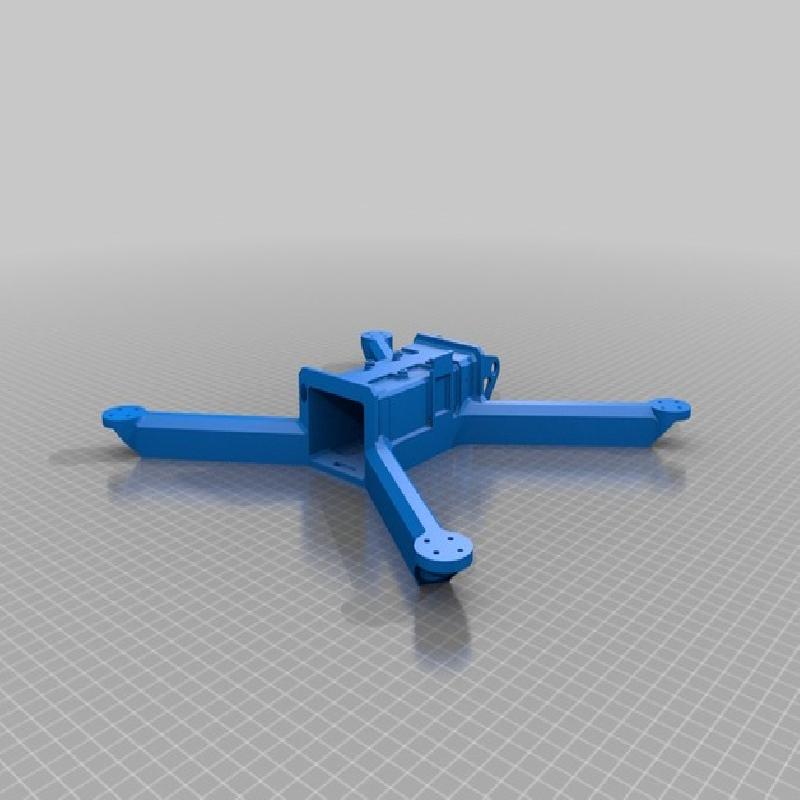
A size class 400 FPV quadcopter assembled over a single piece FDM printable body. Some highlights:
Good FPV flight performances for its class due to high frame rigidity (comparable to frames made from single carbon fiber sheets) and relatively low inertia moment
servo-operated tiltable FPV CCD camera mount with 180° mechanical range integrated in the unibody frame.
Frame has dedicated fixing points for video TX, ESC, cables, antenna,...
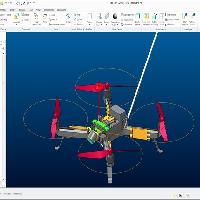
BOM and exploded diagram of the project with all components and screws located, for easy assembly.
Printable & easly replaceable landing gears
Optional RX antenna guard lets you use those old FM/PCM transmitters working at 35-72 Mhz.
Typical flight time is 18-20 minutes with a 4200 mAh 4s battery.
Weight is 250g for the frame alone, ~800g for the assembled quad without battery and ~1250g with a 4200 mAh 4s lipo battery
Inertia moments around CoG are 1.07,0.98,1.82 Kg/dm^2 (pitch,roll,yaw)
Battery bay size=50x38x120 mm
Due to the frame size, you'll need a bigger-than-average printer with a minimum build envelope of 320x300x50mm to print the body.
CAD/CAM used for this project is Creo V.2.
Please see the project page on github for more info.
Printer: GermanRepRap X400
Rafts: Doesn't Matter
Supports: Yes
Notes:
Please follow carefully these print instructions (on project page on Github).
There's an exploded diagram with BOM to help you assemble all the printed and electronic parts fpr this project. Once assembled, follow this wiring diagram to connect all the devices.
Finally, assuming you followed the BOM and have my same electronics and powertrain, you can use these PID settings for Cleanflight to start flying right away!